|
|
|
解决方案
摘要:
本文基于光学设计软件 ASAP 对潜望镜系统进行了简单的模型搭建。 通过对 BMP256 色位图 的采集并设置成光源,并通过潜望镜系统模型进行光线追迹仿真,在系统出射端得到了预期的实验 仿真结果。同时对本设计进行了简单评价。
关键词:
潜望镜 ; ASAP;256 色位图
0 引言
0.1 潜望镜
潜望镜是指从海面下伸出海面或从低洼坑道伸出地面等等条件下,用以观察海面或地面上活动的装 置。一般用于潜水艇以及坦克观测。潜望镜的光学特性类似于普通望远镜,是一种由平行光入射、 由平行光出射的具有一定放大倍率的目视光学系统。
0.2 位图
位图图像又称为点阵图像或绘制图像,由像素组成。 256 色位图又称 8 位图,由 256 种颜色的像素构成,每一个像素可以由一个八位的二进制数来表示。位图利用 bmp 类型作为存储方式,以用作图片显示与图像处理等等领域。
0.3 ASAP
ASAP 是一种可进行系统建模与光线追迹仿真的光学设计软件。在本研究中,利用 ASAP 软件对潜艇 用潜望镜进行简单的模型构建,同时利用位图图像作为光源进行光线追迹,以用来评价所设计的潜望镜系 统光线传输能否达到预期效果。
我们预期设计一个潜望镜系统。对系统建模的预期:镜筒长度在 6m 至 16m 之间,镜筒直径在 160mm 至 300mm 之间,入射口径为 300mm*300mm ,并且具有一定的放大率。对光线仿真的预期: 希望可以在出射面上对光源发出的光线进行观测, 并基本能够看清被观测的图像。
1 系统搭建
首先利用 ASAP 的 Builder 功能进行潜望镜系统的搭建。最简单的方法是分别在上下两端设立两个相同尺寸的平面反射镜 S1 与 S2,两个反射镜平行放置并与 xz 坐标面成 45 度角,此系统的放大倍率为 1。我们希望能够搭建出入射与出射有一定的放大倍率的系统,即 S1与 S2 尺寸不同, 进而我们在靠近两片反射镜处放置两块正透镜 L1 与 L4 。在本系统中, 这两片正透镜使得放大倍率为 1/3。由于加入了 L1 与 L4, 原本正立的出射光变为了倒立的出射光, 进而考虑增 加一个转像系统,由正透镜 L2 与 L3 构成,其中 L2与 L1 共焦、L3 与 L4 共焦。搭建的系统总长度为 8.4m,镜筒直径为 0.3m。
表1 潜望镜系统参数
Table 1 Periscope system parameters
| 器件 | 器件参数 (单位: mm) |
器件中心空间坐标 (单位: mm) |
| 光源面 S0 | 口径 300*300 | (0,5400,-400) |
| 入射面 S1 | 口径 300*300 | (0,5400,0) |
| 透镜 L1 | 直径 300 焦距 2000 厚度 12 |
(0,5000,0) |
| 透镜 L2 | 直径 200 焦距 1000 厚度 10 |
(0,2000,0) |
| 透镜 L3 | 直径 160 焦距 1500 厚度 10 |
(0,0,0) |
| 透镜 L4 | 直径 160 焦距 1000 厚度 10 |
(0,-2500,0) |
| 出射面 S2 | 口径 100*100 | ( 0,-2800,0 ) |
| 探测面 S3 | 口径 100*100 | ( 0,-2800,200) |
平行光线从光源面 S0 发出,以 45 度的入射角投射在入射面 S1 上,进而正入射于正透镜 L1,光线经过 L1 会聚于 L1、L2 的共焦焦点, 投射到正透镜 L2 上, 由 L2 出射平行光至正透镜 L3,L3 出射光会聚到 L3、 L4 的共焦焦点,由正透镜 L4 输出平行光,以 45 度 的入射角投射在出射面 S2 上,进而由探测面 S3 接收由 S2 反射来的平行光。由于转像系统两正透镜 L2、 L3 之间传播的是平行光,所以 L2 与 L3 之间的距离可以调整, 由这一性能可以还原潜望镜系统可伸缩的构造。
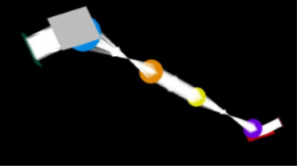
图 1 潜望镜系统示意图
Fig.1 Diagram of Periscope
将系统搭建完好之后我们进行对系统进行光线追迹,设定由光源面位置发出均匀水平的光线,由探测面接收,可以看到探测面上接收的光线是平行光,说明系统搭建情况符合预期, 观察探测面上的光线,可以看到均匀的阵列点,也验证了经过系统后出射光是均匀平行的光线。
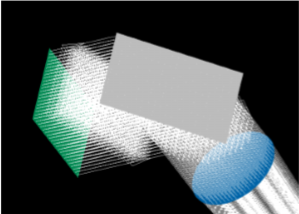
图 2 入射面情形
Fig.2 Diagram of the incident plane
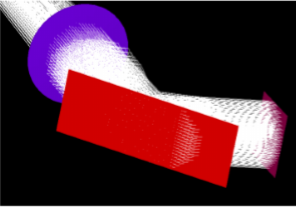
图3 出射面情形
Fig.3 Diagram of the emergent surface
2 仿真分析
选取一张 256 色的 bmp 位图进行位图仿真分析,将位图命名为 TUPIAN.bmp 。实验中选取的 256 色位图如图 4 所示。

图 4 256色位图原图
Fig.4 256-color bitmap image
在 ASAP 中自定义宏语言并编写宏语言调用程序对位图信息进行捕捉,设置其成为可用的光源。
定义一个宏语言进行 bmp 位图的图像信息捕捉, 采集到位图信息用于设定横纵坐标方向。 在仿真过程中分别设定位图光源尺寸为 300mm*300mm 以及 160mm*160mm 两种模式来观察仿真结果, 设定光源发出的光通量为 100lm。将位图信息捕捉之后,首先观察位图的采集点图情形,如图 6 所示。
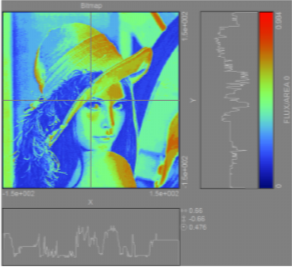
图 6 位图采集点光谱分布图
Fig.6 The spectral distribution of captured bitmap
由图 6 作为光源,发出平行光进入系统进行图像仿真,观察探测面处的光线采集点图与光通量分布 图。首先使用 300mm*300mm 尺寸的光源进行仿真, 结果如图 7、图 8 所示。

图 7 300mm*300mm 尺寸光源探测面采集点图
Fig.7 The collection point figure of detecting surface for 300mm*300mm light
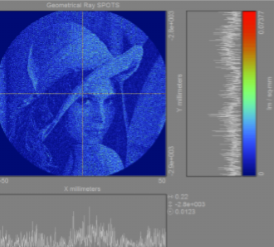
图 8 300mm*300mm 尺寸光源探测面光谱分布图
Fig.8 The spectral distribution of detecting surface for 300mm*300mm light
在探测面上可以看到由采集到的光线所还原的采集点图,对比原图可以发现传输还原效果良好。其中 探测面上的光线采集点图四角部分没有接收到光线,这是因为所设计的潜望镜系统的透镜 L1 相当于一个直径为 300mm 的孔径光阑,限制了 300mm*300mm 尺寸的矩形光源光线入射。接下来将光源尺寸调节为 160mm*160mm 进行仿真, 使得矩形光源发出的平行光线能够全部通过孔径光阑进入潜望镜系统中,仿真结果如 图 9、图 10、图 11 所示。

图 9 160mm*160mm 尺寸光源 探测面采集点图
Fig.9 The collection point figure of detecting surface for 160mm*160mm light
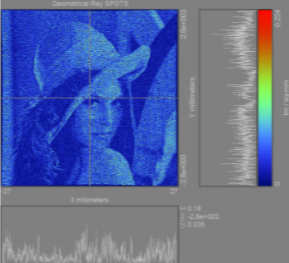
图 10 160mm*160mm 尺寸光源 探测面光谱分布图
Fig.10 The spectral distribution of detecting surface for 160mm*160mm light

图 11 在探测面上接收的光通量分布
Fig.11 The flux distribution of detecting surface
可以看到将尺寸减小之后的光源发出的光线能在探测面上被接收到。预先设置光源发出的光通量为 100lm,由探测面上接收到的光通量为 99.99997lm,认为构建的系统为理想成像系统, 光线传输的效率在 99.9% 以上。
3 系统评价
3.1 预期评价
本系统根据实际潜望镜的尺寸参数进行建模仿真,其模型与实物尺寸类似,在位图仿真的结果中也能看到出射光线的光通量分布完好,认为本系统建模仿真成功。
因为在设置系统结构的过程中,设计的入射光线是完全的平行光, 同时设计的反射、透射都是理想状态,所以本系统本质上近似于理想光学系统。由此可以对非理想状态进行一种后续的分析拓展思路。
3.2 仿真关
由于本潜望镜系统的光学特性是平行光入射,平行光出射,入射与出射的焦点均在无穷远处,属于无焦 系统。所以由位图仿真得到的结果并不是潜望镜的物像关系,该结果仅用于验证系统设计的理想性。
本设计欲用于人眼观察,即目视系统。欲仿真目视系统的情形,可以在出射面后放置一正透镜以会聚光线来仿真人眼观察的情形,作为一种项目拓展的思路。
3.3 枕形畸变
由探测面的二维散点图以及光通量分布图上可以看到:相比于原图的光谱分布图, 输出的光线产生了部分枕形畸变。如图 12、图 13 所示。
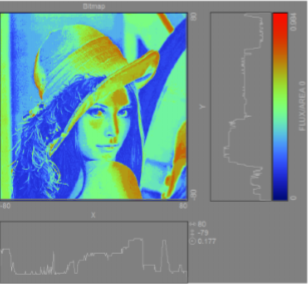
图 12 光源无畸变示意图
Fig.12 The diagram of light source without distortion schematic
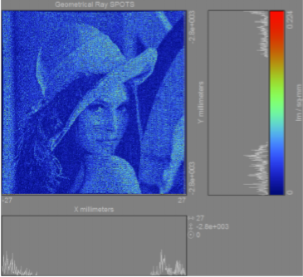
图 13 探测面枕形畸变示意图
Fig.13 The schematic diagram of detecting surface with pincushion distortion
可以看到:bmp 位图采样图中,将探测坐标轴放置在接近右下角处可以看到有光谱分布,而相应的在探测面上的附近位置,探测到两侧出现光通量分布而中间部分的光通量为 0,这是产生了枕形畸变的体现。分析可知,本实验系统中所用的透镜并不是理想透镜,其具有一定的厚度与曲率半径,使得其主光线球差随视场角改变而不同,进而出现畸变。出现枕形畸变使得接收到的图像产生了细微的失真,但是对于目视光学系统,并不会影响其成像的清晰度。分析知若想要减小这种畸变,可以在设计潜望镜系统透镜的过程中对其参数进行优化,以减小畸变的影响。
3.4 拓展方向
本系统仅对潜望镜系统的内部构造的光学部分进 行了仿真,可以拓展在其他软件例如 Solidworks 等对 外壳进行设计,并导入至 ASAP 中与本系统进行结 合,可以进一步还原潜望镜的构造
4 结论
由以上建模仿真结果可以看到,建立的潜望镜系统参数能够达到预期,利用位图光源做光线追迹得到了 理想的仿真效果,认为潜望镜系统的简单系统建模成功。
ASAP/APEX技术交流群 373021576
SYNOPSYS光学设计与优化交流群 965722997
RP激光软件交流群 302099202
武汉墨光科技有限公司
友情链接
Copyright © 2012-2021 武汉墨光科技有限公司版权所有
许可证:鄂ICP备17024342号-1