|
|
|
技术资源
很多镜头设计初学者和许多镜头设计师都认为,像差必须得到很好的控制。 他们只说对了一部分 - 但这些要求总是指三阶像差,但如果要求三阶像差都为零。 这是不明智的。
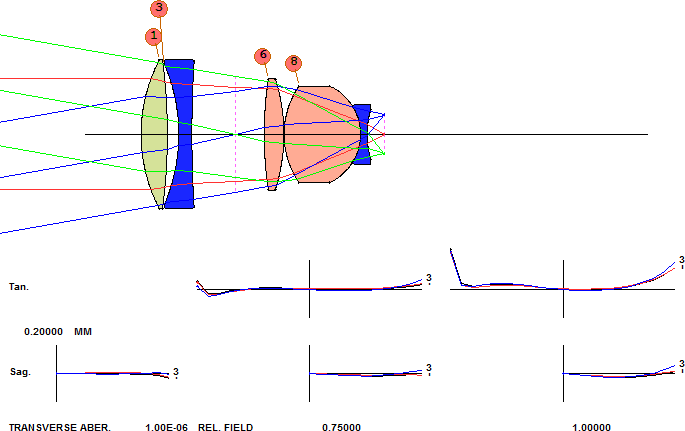
复制以下透镜文件并将其粘贴到EE编辑器中并运行它。 这是一个五片式透镜。
RLE
ID FIVE-ELEMENT LENS 124
WAVL .6562700 .5875600 .4861300
APS 5
UNITS MM
OBB 0.000000 10.00000 25.40000 -8.63996 0.00000 0.00000
25.40000
MARGIN 1.270000
BEVEL 0.254001
0 AIR
1 RAD 73.9295960000000 TH 12.00000000
1 N1 1.79798347 N2 1.80318130 N3 1.81530119
1 GTB S 'LASFN30 '
1 EFILE EX1 34.000000 34.000000 34.000000 0.000000
1 EFILE EX2 34.000000 34.000000 0.000000
2 RAD -263.9335099999995 TH 5.22356650 AIR
2 EFILE EX1 34.000000 34.000000 34.000000
3 RAD -81.3505230000000 TH 6.00000000
3 N1 1.83648474 N2 1.84664080 N3 1.87201161
3 CTE 0.830000E-05
3 GTB S 'SF57 '
3 EFILE EX1 31.841015 33.619003 34.000000 0.000000
3 EFILE EX2 33.365005 33.365005 0.000000
4 RAD 553.8617899999995 TH 19.92504900 AIR
4 EFILE EX1 33.365005 33.365005 34.000000
5 CV 0.0000000000000 TH 13.18557900 AIR
6 RAD 169.2089400000000 TH 9.00000000
6 N1 1.67418625 N2 1.67790015 N3 1.68646733
6 GTB S 'LAKN12 '
6 EFILE EX1 25.241916 25.241916 25.495917 0.000000
6 EFILE EX2 25.241916 25.241916 0.000000
7 RAD -83.9867310000000 TH 0.10051658 AIR
7 EFILE EX1 25.241916 25.241916 25.495917
8 RAD 39.2493850000000 TH 34.99484900
8 N1 1.67418625 N2 1.67790015 N3 1.68646733
8 GTB S 'LAKN12 '
8 EFILE EX1 22.063038 22.063038 22.063038 0.000000
8 EFILE EX2 22.063038 22.063038 0.000000
9 RAD -24.3037950000000 TH 3.00000000
9 N1 1.79607463 N2 1.80516268 N3 1.82772732
9 CTE 0.810000E-05
9 GTB S 'SF6 '
9 EFILE EX1 12.935701 12.935701 13.697701 0.000000
9 EFILE EX2 11.336482 13.443700 0.000000
10 RAD 38.6888290000000 TH 7.79631890 AIR
10 EFILE EX1 11.336482 13.443700 13.697701
11 CV 0.0000000000000 TH 0.00000000 AIR
END
让我们制作一个可以有效控制三阶像差的优化MACro。
在EE编辑器中,输入(L6M1.MAC)
PANT
VLIST RAD ALL
VLIST TH ALL
VLIST GLM 1 3 6 8 9
END
AANT
M 1 1 A FNUM
M 7.8 1 A BACK
M 0 1 A DELF
M 0 1 A SA3
M 0 1 A CO3
M 0 1 A TI3
M 0 1 A SI3
M 0 1 A PETZ
M 0 1 A DI3
M 0 1 A PAC
M 0 1 A SAC
M 0 1 A PLC
M 0 1 A SLC
END
SNAP
SYNO 30
该MACro将改变所有设计变量并控制F/number ,离焦和后焦距,并同时以三阶像差校正为零作为目标。 输入VLIST RAD ALL将改变所有半径,VLIST TH ALL将改变所有厚度和空气间隔,本例中我们不建议使用VLIST GLM ALL命令,因为该命令将会改变透镜的材料,在这个例子中,我们必须单独声明表面。
我们运行这个MACro,得到了一个糟糕的结果!

我们用命令查看三阶像差
THIRD
SYNOPSYS AI>THIRD
ID FIVE-ELEMENT LENS 179 01-JUN-17 13:49:05
THIRD-ORDER ABERRATION ANALYSIS
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT
50.804 25.400 8.958
THIRD-ORDER ABERRATION SUMS
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR))
-9.657E-06 -0.00027 -3.991E-05 -6.235E-06 1.060E-05 -0.00056
PARAXIAL CHROMATIC ABERRATION SUMS
AX COLOR LAT COLOR SECDRY AX SECDRY LAT
(PAC) (PLC) (SAC) (SLC)
-0.00276 -0.00027 0.01062 0.00112
SYNOPSYS AI>
结果显示 这些像差非常小。那么初始透镜的像差怎么样?
ID FIVE-ELEMENT LENS
THIRD-ORDER ABERRATION ANALYSIS
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT
50.800 25.400 8.957
THIRD-ORDER ABERRATION SUMS
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR))
-0.01806 -0.03730 -0.04236 -0.08744 -0.10998 -0.01754
PARAXIAL CHROMATIC ABERRATION SUMS
AX COLOR LAT COLOR SECDRY AX SECDRY LAT
(PAC) (PLC) (SAC) (SLC)
-0.01215 0.01518 0.00724 0.00478
这些像差要大得多 - 但初始透镜性能要好得多! 所以在像差平衡方面,不要试图将像差校正到极端状态。
一般人们在设计透镜时,通常只关心两件事:图像是否清晰,是否在正确的位置。
然而,这些三阶像差在降低公差敏感度上有很重要的作用。 这是因为,当透镜制造偏差越大,三阶像差变化最快。 因此,我们定义了一组可以放入AANT文件的八个定义像差的命令:
SAT COT ACD ACT ECD ECT ESA ECO
| SAT | 表面对球差的贡献的平方和SA3。 |
| COT | 表面对慧差贡献的平方和CO3。 |
| ACD | 每个表面偏心时CO3变化量的平方和。 |
| ACT | 每个表面倾斜时CO3变化量的平方和。 |
| ECD | 每种元件偏心时CO3变化量的平方和。 |
| ECT | 每个元件倾斜时CO3变化量的平方和。 |
| ESA | 元件对球差的贡献的平方和SA3。 |
| ECO | 元件对慧差贡献的平方和CO3。 |
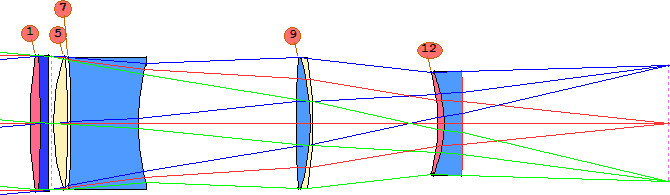
以下是如何使用这些像差来放宽透镜公差的示例。 我们优化了下面所示的透镜,并以目标波前权重0.05运行BTOL。
RLE
ID 8-ELEMENT TELEPHOTO 236
FNAME 'L6L2.RLE '
MERIT 0.145212E-01
LOG 236
WAVL .6562700 .5875600 .4861300
APS 4
GLOBAL
UNITS MM
OBB 0.000000 5.00000 25.40000 -0.88448 0.00000 0.00000
25.40000
0 AIR
1 RAD 107.5431718565176 TH 11.00000000
1 N1 1.61726800 N2 1.62040602 N3 1.62755182
1 CTE 0.630000E-05
1 GTB S 'SK16 '
2 RAD -349.2713337442812 TH 3.00000000
2 N1 1.69220502 N2 1.69894060 N3 1.71544645
2 CTE 0.790000E-05
2 GTB S 'SF15 '
3 RAD -2.9912862137173E+05 TH 1.00000001 AIR
TH 1.00000001 AIR
TH 5.00000000
5 N1 1.51981155 N2 1.52248493 N3 1.52859442
5 CTE 0.820000E-05
5 GTB S 'K5 '
6 RAD -90.4865897926554 TH 1.35282284 AIR
7 RAD -87.2286998720792 TH 3.00000000
7 N1 1.61502503 N2 1.62003267 N3 1.63207204
7 CTE 0.820000E-05
7 GTB S 'F2 '
8 RAD 491.7930148457936 TH 73.15839431 AIR
9 RAD 218.6390525466715 TH 6.00000000
9 N1 1.61502503 N2 1.62003267 N3 1.63207204
9 CTE 0.820000E-05
9 GTB S 'F2 '
10 RAD -99.1627747164714 TH 3.00000000
10 N1 1.51981155 N2 1.52248493 N3 1.52859442
10 CTE 0.820000E-05
10 GTB S 'K5 '
11 RAD -182.3746109793576 TH 45.48880137 AIR
12 RAD -67.5075897018110 TH 3.00000000
12 N1 1.61726800 N2 1.62040602 N3 1.62755182
12 CTE 0.630000E-05
12 GTB S 'SK16 '
13 RAD -40.7083005956173 TH 7.00000000
13 N1 1.61502503 N2 1.62003267 N3 1.63207204
13 CTE 0.820000E-05
13 GTB S 'F2 '
14 RAD -832.2479524920537 TH 86.31660394 AIR
14 CV -0.00120156
14 UMC -0.10260000
14 TH 86.31660394
14 YMT 0.00000000
15 CV 0.0000000000000 TH 0.00000000 AIR
END

一些公差降低得非常快速,如下表所示,其中标称数据是针对此透镜的。
| 3 TH | 6 wedge | 7 tilt | 5 YDC | 7 YDC | 9 YDC | 12 YDC | |
| Nominal | 0.034 | 0.23 min | 0.24 min. | 0.0042 | 0.0034 | 0.0053 | 0.0086 |
| Case A | 0.091 | 0.67 | 0.42 | 0.011 | 0.009 | 0.011 | 0.011 |
| Case B | 0.112 | 0.87 | 0.89 | 0.015 | 0.018 | 0.025 | 0.014 |
将透镜位置保持公差很紧导致制造成本将会很昂贵。(看看表面7上的中心公差。)所以我们按如下方式进行:
1.运行命令THIRD SENS,查看这些参数的当前值。
THIRD SENS
ID 8-ELEMENT TELEPHOTO
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY
SS OF SA3 BY SURFACE (SAT) = 85.107903
SS OF CO3 BY SURFACE (COT) = 21.404938
SS OF CO3/YDC BY SURFACE (ACD) = 0.007657
SS OF CO3/TILT BY SURFACE (ACT) = 73.889722
SS OF CO3/YDC BY ELEMENT (ECD) = 0.003941
SS OF CO3/TILT BY ELEMENT (ECT) = 31.259708
SS OF SA3 BY ELEMENT (ESA) = 1.944190
SS OF CO3 BY ELEMENT (ECO) = 0.492351
2.由于我们主要关注中心误差,我们可能会尝试降低ECD的值,即当元件偏心变化时,CO3的变化。 让我们添加到AANT文件(在L6M2.MAC中)的行
M .001 100 A ECD
由于ECD已经是一个很小的数字(与列表中的其他数字相比),我们给它一个很高的权重,因此它对评价函数产生了影响。 请记住,我们不能简单地将所有这些值都定为零,因为通常不能设计没有任何像差的透镜元件,并且没有光焦度。 而且,这些量以不明显的方式耦合。 例如,如果减少SAT的值,您可能会发现COT也变小了。
你不能给他们各自分配一个独立的值,并期望程序可以自己找到这样的组合。 因此,明智的做法是一次一个地进行,直到找到最适合您透镜的参数。 在这个例子中,控制ECD的值,即可得到透镜。
THIRD SENS
ID 8-ELEMENT TELEPHOTO
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY
SS OF SA3 BY SURFACE (SAT) = 7.027782
SS OF CO3 BY SURFACE (COT) = 4.876613
SS OF CO3/YDC BY SURFACE (ACD) = 0.001649
SS OF CO3/TILT BY SURFACE (ACT) = 19.621736
SS OF CO3/YDC BY ELEMENT (ECD) = 0.001064
SS OF CO3/TILT BY ELEMENT (ECT) = 8.602740
SS OF SA3 BY ELEMENT (ESA) = 0.185606
SS OF CO3 BY ELEMENT (ECO) = 0.127624
即使我们只针对其中一个(ECD),请注意所有值都已更改。 该透镜的公差列于上表中的情况A.。显然,现在的公差要宽松得多,尽管这对制造商来说仍然是一个挑战。 让我们再试一试。 这次我们将ACT的值定为7.0,即标称值的1/10。
M 7 1 A ACT
透镜视图如下:
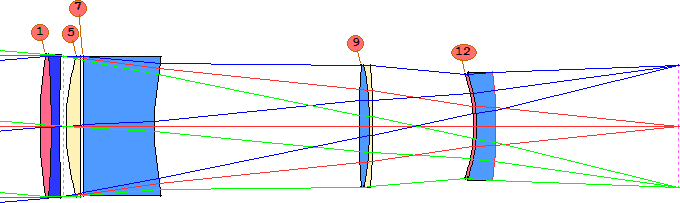
公差列在上面的案例B中。 对于一些公差来说,这可能是更好的预估。 (我们忽略了本课程的可制造性问题:某些元件太薄,应该使用ACM监视器进行控制。)
您选择控制的数量取决于您想要影响的公差。 例如,空气间隔的公差可以响应对ESA数量的控制。 另一方面,透镜厚度公差可能对SAT更好地响应。 您必须了解您的透镜,并尝试使用这些工具,以找到最佳目标和最佳BTOL预估。
有时这些量的作用是增加评价函数。 通常这不是一个好主意,因为如果像质变得更糟,公差通常会变得更紧。 但是,本课中工具的放松效果有时会超过这种效果,无论如何都会使公差更加宽松。 当然,这只能在一定程度范围之内,如果评价函数太大,你的评价函数应该要求一个要求较低的值。
我们无法保证任何这些像差目标在任何特定情况下都能起作用,但经验表明它们肯定值得一试。 您的公差可以放宽2到10倍。
最后,我们提到控制单个元件灵敏度的另一种非常有效的方法是使用SECTION像差。 虽然本课程中讨论的数量适用于所有表面或元件,因此非常易于使用,但SECTION像差仅适用于您指定的表面范围。 如果一个元件仍然被分配了一个非常紧的中心公差,即使你尝试了本节中给出的目标 - 如果某些元件的公差变得更宽松但问题元件的公差变得更紧,可能会发生这种情况 - 你可能只控制那个含彗差或球差的元件。 这使您可以精确控制所需的像差,并且通常值得采取额外步骤。 例如,如果表面13和14处的元件非常敏感,您可以尝试
M 0 .1 A SECTION SA3 13 14
并尝试目标和权重直到获得最佳效果。
ASAP/APEX技术交流群 373021576
SYNOPSYS光学设计与优化交流群 965722997
RP激光软件交流群 302099202
武汉墨光科技有限公司
友情链接
Copyright © 2012-2021 武汉墨光科技有限公司版权所有
许可证:鄂ICP备17024342号-1